
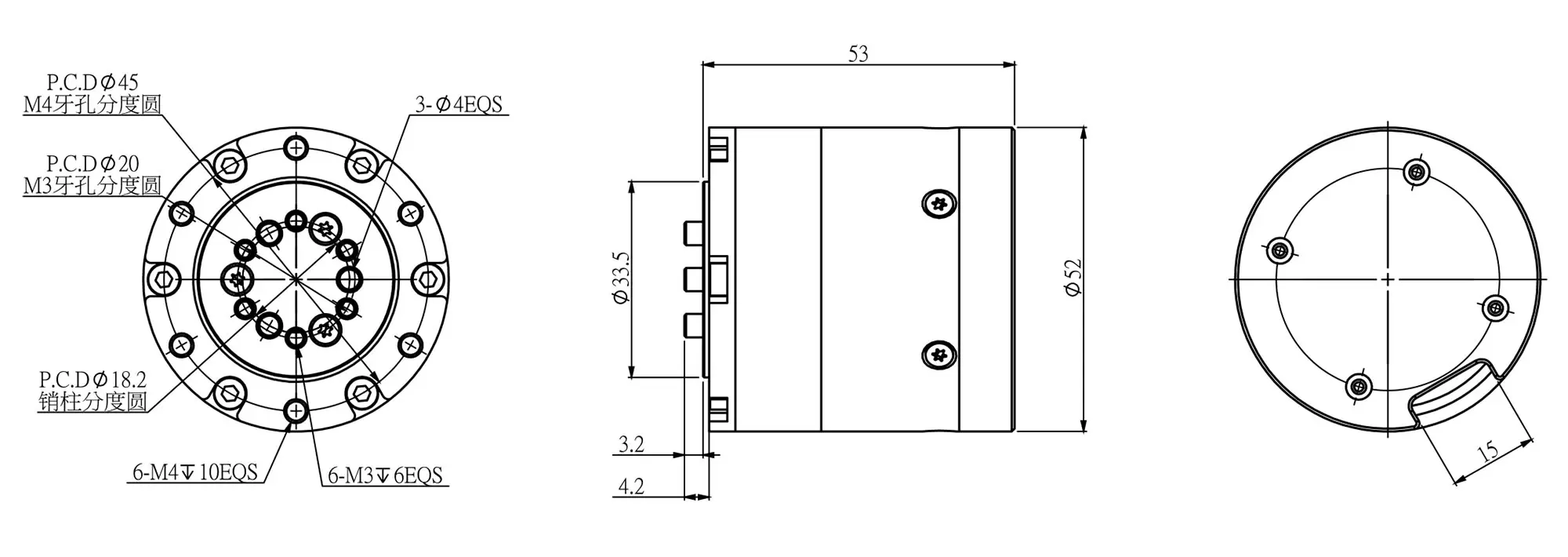
Robot Joint Motor Actuator : ND-A4012-25
Maintains precise control at low speeds
Productfeatures:
· Maintains precise control at low speeds
· Enables rapid motor direction reversal
· Achieves closed-loop control of torque, speed, and position
· Fast response, stable operation, low vibration, and low noise
· Optimized motor slot design, high torque density, and optimized cogging torque
· High-precision planetary gear reducer (helical gears), with a tooth root roundness of less than 3 arc minutes
· Supports dual encoders to further enhance feedback control accuracy
· Supports daisy-chain configuration for multiple units, facilitating power supply and data transmission




Product Description:
| ND-A4012-25 Joint Actuator | ||
| Model | Unit | Value |
| Ratio | / | 25 |
| Rated Voltage | V | 48 |
| Rated Current | A | 4.5 |
| Rated Power | w | 200 |
| Rated Torque | Nm | 3.5 |
| Peak Torque | Nm | 10 |
| Rated Speed | RPM | 120 |
| Peak Speed | RPM | 150 |
| Overall Efficiency | % | 85 |
| Gearback | Arcmin | <20 |
| Torque Density | Nm/kg | 29.4 |
| Weight | g | 330±10 |
| Dimensions | Mm | Ф52-53 |
| Communication Protocol | / | |
| Baud Rate | / | |
| Encoder | / | |
Application
Related products
-
 Contact Us
Contact UsWe are ATLAS COPCO 3002600380 AIR/OIL FILTER KIT supplier and provide replacement parts for major air compressor manufacturers. Please feel free to contact us at henry.guan@foxmail.com with any questi
-
 Contact Us
Contact UsDesigned with consistent dimensions, excellent electrical conductivity, and high corrosion resistance, these pins are ideal for a wide range of connector systems, circuit assemblies, and power modules
-
 Contact Us
Contact UsWuxi Aojin Hydraulic Machinery Co., Ltd. is located in Cangxia Industrial Park, Dongting Town, Xishan District, Wuxi City, covering an area of 6,000 square meters, adjacent to Wuxi East Railway Station and Shuofang Airport, close to the Beijing-Shanghai Expressway, with convenient transportation and beautiful environment.
-
 Contact Us
Contact UsThe company’s main products are high precision involute cylindrical gears,We specialize in manufacturing of gears products such as spur gear,helical gear, herringbone gear, external spline…
-
 Contact Us
Contact UsWe are ATLAS COPCO 3001500626 MPV KIT supplier and provide replacement parts for major air compressor manufacturers.
Reviews
There are no reviews yet.